You could try something like pyrender.
For documentation purposes here’s one of their example:
import numpy as np
import trimesh
import pyrender
import matplotlib.pyplot as plt
fuze_trimesh = trimesh.load('examples/models/fuze.obj')
mesh = pyrender.Mesh.from_trimesh(fuze_trimesh)
scene = pyrender.Scene()
scene.add(mesh)
camera = pyrender.PerspectiveCamera(yfov=np.pi / 3.0, aspectRatio=1.0)
s = np.sqrt(2)/2
camera_pose = np.array([
[0.0, -s, s, 0.3],
[1.0, 0.0, 0.0, 0.0],
[0.0, s, s, 0.35],
[0.0, 0.0, 0.0, 1.0],
])
scene.add(camera, pose=camera_pose)
light = pyrender.SpotLight(color=np.ones(3), intensity=3.0,
innerConeAngle=np.pi/16.0,
outerConeAngle=np.pi/6.0)
scene.add(light, pose=camera_pose)
r = pyrender.OffscreenRenderer(400, 400)
color, depth = r.render(scene)
plt.figure()
plt.subplot(1,2,1)
plt.axis('off')
plt.imshow(color)
plt.subplot(1,2,2)
plt.axis('off')
plt.imshow(depth, cmap=plt.cm.gray_r)
plt.show()
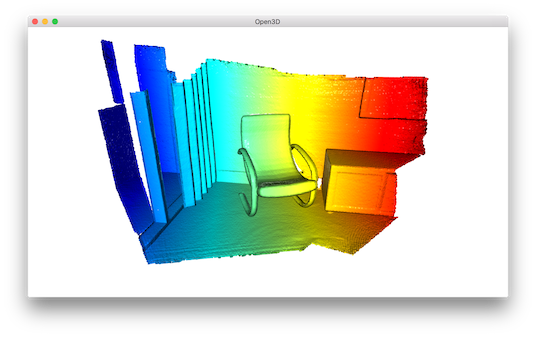
or Open3D.
Again, one of the library supplied examples:
pcd = o3d.io.read_point_cloud("../../TestData/fragment.ply")
o3d.visualization.draw_geometries([pcd], zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])